| ★ HARDWARE ★ MONTAGES ★ INFORMATIQUE PRATIQUE : Commandons la vitesse d'un moteur ★ |
| Informatique pratique - Commandons la vitesse d'un moteur (Science&Vie) | Hardware Montages |
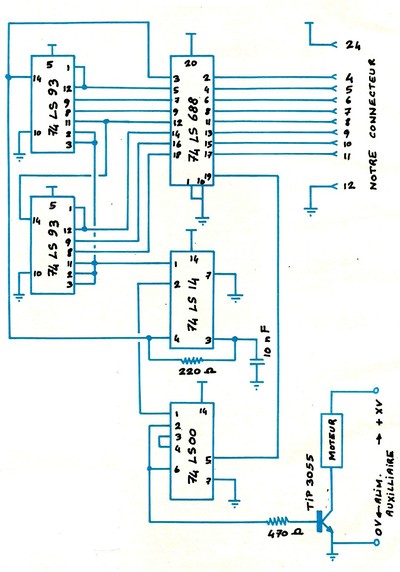
Nous avons vu, le mois dernier, comment commander un moteur depuis notre ordinateur et comment, éventuellement, commander son sens de rotation. Ce mois-ci nous nous intéresserons à sa vitesse de rotation.Le problème sera assez simple puisqu'il suffira de faire varier la valeur efficace de la tension qui l'alimentera. Cependant deux options sont offertes, du moins dans le cas de moteurs alimentés en courant continu. La première consiste à faire varier la tension d'alimentation, la seconde à envoyer au moteur des impulsions, très rapprochées, d'une tension constante mais dont le rapport cyclique sera variable. Derrière cette expression savante se cache une évidence. Par exempte, si nous envoyons toutes les secondes au moteur une impulsion de 15 volts durant 1 dixième de seconde, il “tournera” comme si nous l'alimentions en 1,5 volt. Pour des raisons d'inertie mécanique un tel rapport n'est pas envisageable. Si l'on choisit de faire varier la tension continue, l'électronique devra "dissiper” l'énergie non exploitée par le moteur. Hormis donc le faible rendement énergétique d'une telle solution il nous faudrait disposer d'un montage capable de dissiper sous forme de chaleur l'énergie perdue ; d'où l'emploi de gros transistors associés à des radiateurs. Dans notre cas nous nous en tiendrons à l'envoi d'impulsions, mais très rapprochées (1000 par seconde). Ainsi les problèmes de rendement seront-ils résolus et, par voie de conséquence, le transistor utilisé pour assurer un tel asservissement ne chauffera que peu. Les spécialistes nomment régulation par découpage (découpage du courant continu) ce type de pilotage de la valeur efficace de la tension d'alimentation d'un moteur ou, plus simplement, alimentation à découpage. Pour en revenir à notre cas, nous partirons d'une alimentation en courant continu de 15 volts et nous ferons varier la durée pendant laquelle le moteur sera alimenté par rapport à celle où aucun courant ne lui sera fourni : tout ceci sous contrôle de notre ordinateur. Passons donc à l'étude du principe de fonctionnement. Le but est donc de fournir au moteur une tension au rapport cyclique variable. Pour cela, et de manière à être compatible avec un système informatique, le cœur de notre réalisation sera un compteur associé à un comparateur logique. En effet le compteur aura pour fonction de faire défiler sans cesse des chiffres, binaires, compris entre 0 et 255.
Le comparateur indiquera à chaque instant si le chiffre présenté par le compteur est identique ou non à celui choisi par l'ordinateur. Pour moduler la tension d'alimentation de notre moteur il suffira donc de la commander tant que le chiffre du compteur sera inférieur à la valeur choisie par l'ordinateur et de l'annuler dès que ce cap sera franchi. Nous obtiendrons ainsi, le compteur retombant à 0 après 255, un taux de remplissage de l'alimentation du moteur variable avec une précision de 1/255 : précision largement suffisante pour la plupart des applications. Le résultat de la comparaison de ces deux chiffres binaires sera, temporairement, mémorisé par deux portes NAND montées en “latch”. Le signal issu de ces dernières sera donc directement exploitable pour la commande du transistor d'alimentation du moteur. Notons que la présence de ce transistor nous permet de nous libérer de la contrainte des 5 volts utilisés par les circuits logiques. Le moteur pourra donc posséder une tension de fonctionnement à plein régime de 10, 20 ou 40 volts. Seule l'alimentation en courant continu auxiliaire devra être calibrée à cet effet. Le câblage de ce montage ne doit pas poser de problème : il sera réalisé en wrapping. Comme toujours nous commencerons par disposer sur notre plaquette de câblage l'ensemble des supports pour circuit-intégré. Le câblage de l'alimentation sera alors effectué et, enfin, l'ensemble des connections établies. Rappelons qu'il est conseillé de souder chaque support par quatre de ses broches au moins, pour une résistance mécanique acceptable. En ce qui concerne la mise en place du transistor, du condensateur et des résistances il y a deux possibilités pour réaliser leurs connexions : soit les insérer dans des supports pour circuits intégrés, et le câblage sera assuré par wrapping des broches du support tout comme dans le cas d'un simple circuit intégré; soit les souder directement sur les pastilles de la plaquette de câblage. Dans ce dernier cas il faudra prendre soin de laisser dépasser suffisamment leurs pattes de manière à pouvoir enrouler le fil à wrapper autour. Rappelons que le 0 volt et le + 5 volts de l'ordinateur seront utilisés pour alimenter les circuits logiques de ce montage. L'alimentation auxiliaire, elle, devra être choisie en fonction du moteur utilisé. Dans tous les cas il devra s'agir d'une alimentation délivrant une tension continue ou au moins filtrée. Son 0 volt sera relié à la masse du montage (0 volt de l'ordinateur) et sa borne + sera reliée au moteur. L'autre borne de ce dernier sera connectée au transistor de puissance. Le programme illustrant cette réalisation est des plus simples. Il permettra simplement de faire varier la vitesse de rotation du moteur entre 0 et 100/100. Pour cela il communiquera à notre interface principale un nombre compris entre 0 et 255. 0 correspondant à l'arrêt du moteur et 255 à son régime maximum. Nous sommes certains que les passionnés de robotique ou d'asservissement auront bien des idées d'applications de cette réalisation et que la modification, ou l'adaptation, du programme ne leur posera pas de problème particulier. Notons, ici encore, que les bornes d'entrées de données dans l'ordinateur ne sont pas exploitées. Il sera donc possible de les utiliser afin de faire accepter par la machine des informations provenant d'interrupteurs en les câblant directement entre l'un des bits et le 0 volt. Henri-Pierre PENEL , Science&Vie n°837
|