







| ★ HARDWARE ★ ROBOT D'ENTRAINEMENT|Microstrad) ★ |
| Robot - Fischertechnik |
Fischertechnik propose une boîte d'éléments permettant la réalisation d'un bras manipulateur. A un prix actuellement sans concurrence pour les possibilités offertes.
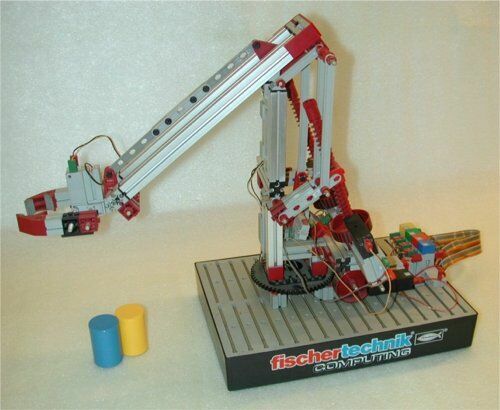
Le guide de construction du robot d'entraînement Fischertechnik est en allemand. Mais il est abondamment illustré et accompagné d'une traduction suffisante qui permet d'achever la réalisation mécanique en trois heures. Les éléments, particulièrement robustes (plastique et métal), sont en quantité juste nécessaire avec un petit surplus de ces pièces que l'on perd si facilement. L'assemblage, qui se fait par emboîtement, requiert une certaine force physique. Cela le rend malheureusement hors de portée d'un enfant de moins de douze ans mais garantit, par ailleurs, la rigidité de la réalisation. Le câblage électrique demande deux heures de patience, le faisceau étant constitué d'une nappe à vingt conducteurs que l'on coupe à la longueur nécessaire avant de commencer. La nappe se termine par un connecteur qui ne permet pas directement l'essai des éléments du robot indépendamment de l'interface; mais il y a peu de raisons de se tromper si on suit attentivement le schéma (attention à la connexion du moteur et du microswitch de la pince ! ). Le bras possède trois articulations (une base pivotante, un avant-bras qui avance et recule, un bras qui monte et descend) et une pince à saisie horizontale (ou verticale, ce qui perme! de manipuler des pièces sur un échiquier). La position zéro de chacun des quatre moteurs est repérée par un contact fin de course. Trois capteurs à infrarouge comptant des traits régulièrement espacés sur des roues entraînées par des moteurs à courant continu permettent de savoir à tout moment quelle est la position exacte de chaque élément. C'est là que réside une grande partie de l'intérêt de cette réalisation. Nous préférons ce système à l'utilisation de moteurs pas à pas, plus coûteux, plus lents et moins proches de la réalité industrielle (où sont plutôt utilisés des systèmes hydrauliques ou pneumatiques nécessitant un asservissement de position).
ROBOT AU BRAS LONG Le robot est relié à la sortie imprimante de l'ordinateur par l'intermédiaire d'une carte d'interface spécifique contenant les circuits de mise en forme des signaux des sept capteurs tout ou rien (sur huit possibles), des deux capteurs potentiométriques (non utilisés), ainsi que les éléments de commande de puissance des moteurs. Les capteurs demandent de la part du logiciel des temps de réponse très courts (comptage d'impulsions) obligeant le recours au langage machine. Heureusement, le logiciel Robot (en français), fourni avec la carte, permet une commande directe du bras ainsi que la création de programmes qui peuvent être sauvegardés (mode apprentissage). Ainsi, nous avons appris à l'ordinateur à échanger un cylindre A posé sur un cube A' avec un cylindre B posé sur un cube B', tout cela en contournant un obstacle posé sur la table (les cubes et les cylindres sont fournis dans la boîte Fischertechnik et s'adaptent particulièrement bien aux deux modèles de pinces proposés). Nous avons demandé à l'ordinateur de répéter dix fois de suite le cycle des opérations, ce qui fut fait avec succès, prouvant la bonne précision de l'ensemble mécanique. JEAN-MARC CAMPANER , MICROSTRAD n°8 , Octobre 1986 & https://cpcrulez.fr
|









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}