S'initier à moindre frais à la robotique n'est plus une gageure. Outils de base : un CPC et des servos.
En Basic, on peut commander directement jusqu'à huit servomoteurs type radiocommande. Sans aucune interface. Mais avec :- la commande en temps réel, en interruption et par RSX, de un à huit servomoteurs simultanément ;
- la connexion sur le port imprimante, laissant libres les autres ports ;
- le fonctionnement avec des servos de nombreuses marques : Lextronic, Robbe, Graupner... à créneau d'entrée positif.
Le seul matériel à prévoir, hormis les servomoteurs, est un câble de connexion en nappe muni à une extrémité d'un connecteur 34 broches (pour le port imprimante) et à l'autre de connecteurs miniatures pour les servos (différents selon les marques). Plus un connecteur à deux broches pour l'alimentation des servomoteurs (sur batterie ou bloc secteur). SCHÉMA DE RÉALISATION 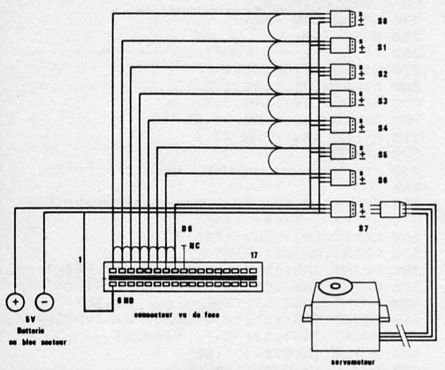
MATERIEL NECESSAIRE - 1m de câble en nappe à 8 conducteurs
- 1 connecteur plat à 34 contacts pour le port imprimante
- + servomoteur(s) à créneau d'entrée positif
- + connecteurs miniatures pour ces servos
Le programme 1 est un chargeur Basic, crée quatre commandes RSX. - |INIT,X initialise le port imprimante et fixe le nombre de canaux actifs (n). C'est la première commande à utiliser dans un programme. La valeur fixée par défaut est 8.
- |ON active le port de sortie pour envoyer vers le port imprimante les ordres de position définis par la commande |SERVO.
- |OFF désactive le port de sortie. Les positions restent mémorisées
Les commandes |ON et |OFF permettent de suspendre le traitement des interruptions quand elles ne sont pas nécessaires, et de retrouver une vitesse normale du Basic. - |SERVO,n,p, est l'ordre de position du servo, dans lequel n représente le numéro du servo concerné, et p sa position. Les valeurs possibles pour n varient entre 1 et x (défini par |INIT,x). Les valeurs admises pour p varient de o à 255 (neutre à 128).
L'ordre de position |SERVO peut être donné avant ou après l'activation par |ON. Dans le premier cas, il sera ainsi possible d'obtenir un mouvement simultané des servos.
Après avoir entré au clavier le programme 1, lancez son exécution. S'il n'y a eu aucune erreur, une pression sur une touche provoquera la sauvegarde du fichier binaire sous le nom de servo.bin, puis activera les extensions RSX. Pour recharger par la suite le programme binaire, vous intégrerez au sein d'un programme quelconque les lignes suivantes : 100 MEMORY &7FFF
110 LOAD “SERVO.BIN”,&8000
120 CALL &8200 Avec le programme 2, baptisé Test, vous testerez rapidement et automatiquement le fonctionnement des différents canaux, à tour de rôle. Enfin, le programme 3 est une base d'expérimentation plus complète, qui permet de programmer les différentes étapes d'un mouvement (d'un bras robot, par exemple), de les éditer, de les modifier pendant leur mise au point, puis d'en obtenir l'exécution à une vitesse choisie. Le mode d'emploi, très simple, offre deux options : mode programmation et mode exécution.
Mode programmation : positionner le servo concerné en pressant sur les touches-curseur droite et gauche. Quand la position est correcte, la mémoriser en pressant enter, puis passer au canal suivant. La touche M provoque le retour au menu. Mode exécution : choisir la vitesse au moyen des flèches-curseur, puis enter.
Attention, le programme 3 charge le programme binaire généré par le programme 1. Il faudra, par conséquent, que ces deux programmes se trouvent sur la même disquette, ou à la suite l'un de l'autre, sur une cassette ! MICROSTRAD n°6
| ★ AMSTRAD CPC ★ DOWNLOAD ★ |
|
CPCrulez[Content Management System] v8.7-desktop/c
Page créée en 176 millisecondes et consultée 1705 foisL'Amstrad CPC est une machine 8 bits à base d'un Z80 à 4MHz. Le premier de la gamme fut le CPC 464 en 1984, équipé d'un lecteur de cassettes intégré il se plaçait en concurrent du Commodore C64 beaucoup plus compliqué à utiliser et plus cher. Ce fut un réel succès et sorti cette même années le CPC 664 équipé d'un lecteur de disquettes trois pouces intégré. Sa vie fut de courte durée puisqu'en 1985 il fut remplacé par le CPC 6128 qui était plus compact, plus soigné et surtout qui avait 128Ko de RAM au lieu de 64Ko. |
|
|













