







| ★ HARDWARE ★ ROBOTS FISCHERTECHNIK - L'ORDINATEUR VOUS SERRE LA PINCE ★ |
| Robot - Fischertechnik - l'Ordinateur Serre la Pince (Science et Vie Micro) |
Deux robots pour passer de la simulation à la réalité AU SENS PROPRE, UN ROBOT EST une machine capable d'effectuer automatiquement un certain nombre d'actions, en ayant un contrôle sur le processus. Le robot, c'est donc le bras mécanique plus l'ordinateur qui exerce la fonction de commande. Pour permettre le dialogue entre la mécanique et l'électronique, une interface traduit les ordres de l'ordinateur et active des moteurs au moyen de relais. Eventuellement, elle fournit en retour au programme de commande des informations sur la position du bras et sur son environnement. Le programme qui pilote le robot peut alors, en fonction de ces données, décider de telle ou telle action ultérieure. Pour définir les caractéristiques d'un robot et évaluer ses performances, on parle du nombre de degrés de liberté dont est doté son bras manipulateur. Chaque degré de liberté correspond à une possibilité de flexion, de rotation ou de déplacement dans une direction donnée. A titre d'exemple, l'articulation du coude chez l'homme possède deux degrés de liberté, l'un correspondant à la flexion et l'autre à la rotation de lavant-bras. Celle de l'épaule en possède trois, un de rotation et deux de flexion. Sur un bras manipulateur, chaque degré de liberté correspond à un moteur indépendant. On comprendra facilement que plus le robot possède de degrés de liberté et donc de moteurs, plus il pourra effectuer des mouvements complexes. Autre élément important dans l'appréciation des possibilités du bras manipulateur, le nombre et la nature des capteurs dont il est équipé. Il est très important en effet qu'il puisse renseigner l'ordinateur sur la position de chacun des éléments du bras et éventuellement sur la présence d'un objet dans la pince. Ces capteurs peuvent être des contacteurs, des dispositifs photo-électriques ou autres. Comme malheureusement les coûts des dispositifs électromécaniques sont loin d'avoir suivi la baisse de ceux des composants électroniques et de la micro-informatique, ces bras manipulateurs sont en général des périphériques assez chers et peu répandus. Fischer Technik (allemand) et Toki (japonais) ont le mérite de proposer des produits plus abordables (quoique pas encore vraiment bon marché) : 3 000 F à 4 000 F pour le robot d'entraînement Fischer Technik, 6 000 F pour le robot Bio Métal de Toki, interfaces comprises. Ce dernier est sans conteste le plus original des deux, à défaut d'être le plus utile. Il n'est en effet pas doté de moteurs au sens classique, mais utilise une technologie de pointe pour actionner son bras : des fils en alliage métallique dits à mémoire de forme, c'est-à-dire qu'ils adoptent deux formes différentes suivant leur température. Lorsqu'ils sont chauffés au moyen d'un courant électrique, ces fils ultra-fins en titane-nickel se contractent (effet contraire à celui de la dilatation par effet Joule) et actionnent les segments articulés du bras robot, comme nos muscles et nos tendons actionnent nos membres. Quatre articulations reproduisent l'épaule, le coude, le poignet et la main. Une cinquième permet de faire pivoter le bras à droite ou à gauche.
En plus de leur nouveauté technique, ces fils présentent deux avantages principaux : un fonctionnement absolument silencieux et une élégance indéniable, à la fois dans la construction et dans les mouvements obtenus. Par contre, ils ont un inconvénient majeur : il n'y a qu'une position immobile possible, celle où tous les fils sont détendus. En effet, dès que l'on cesse de chauffer un fil, celui-ci se rallonge et le bras retourne à sa position d'équilibre. Maintenir le bras dans une position intermédiaire est très délicat, car il faut chauffer puis relâcher constamment les fils concernés. Il en résulte une imprécision importante dans le déplacement, qui de toute façon reste d'une amplitude très modeste (quelques centimètres). Pour contrôler le robot Bio Métal, vous avez l'embarras du choix. Si vous n'avez pas d'ordinateur sous la main, un boîtier électronique permet d'actionner chaque articulation au moyen d'une touche à membrane. L'appui sur une touche établit le courant dans un fil et le fait changer d'état. Un mode démonstration permet de faire fonctionner ce boîtier seul sans vous fatiguer les phalanges. Un deuxième boîtier fait fonction d'interface intelligente. Doté d'un microprocesseur et d'une mémoire, il peut enregistrer et reproduire les mouvements que vous commandez en mode manuel. Il assure également la liaison avec votre ordinateur, soit via une sortie imprimante parallèle, soit via un coupleur optique fourni avec le robot. Ce coupleur, baptisé « E-Z link » , permet de connecter l'interface à n'importe quel ordinateur doté d'un écran vidéo (pas de cristaux liquides ou autres écrans à plasma). E-Z link est un petit boîtier qui se fixe à l'aide d'une bande velcro sur le côté de l'écran. Sur le boîtier, un petit bras articulé porte à son extrémité une cellule photo-électrique, que l'on peut orienter afin de lire un point particulier dans le coin de l'écran. Cette cellule est capable de détecter le clignotement d'un curseur. C'est par la fréquence du clignotement que le programme de pilotage du robot transmet ses ordres au bras articulé. Esthétiquement réussi, bien fini et simple à utiliser, le robot Bio Métal est certainement bien adapté à des démonstrations pédagogiques ou divertissantes. Son utilisation pour des applications de robotique même élémentaires semble par contre exclue en raison de son manque de précision, de puissance et d'amplitude de mouvement. En outre, il n'est doté d'aucun capteur et ne peut informer l'ordinateur sur sa position. C'est un joli gadget, un peu cher. Le robot d'entraînement Fischer Technik est très différent dans sa philosophie. Bien qu'il soit conçu à partir des éléments du jeu de construction qui porte le même nom, il est loin d'être un simple jeu d'enfant. Assembler les 250 et quelques pièces qui constituent sa partie purement mécanique prend trois à quatre heures ; il faudra en compter autant pour le câblage électrique, opération encore plus délicate. Heureusement, les schémas du manuel de montage sont très clairs et très nombreux. Au fur et à mesure de l'assemblage, vous découvrirez en détail la conception du pivot central, des deux segments du bras actionnés par des vis sans fin, et enfin de la pince qui est toujours maintenue en position horizontale par un système de tringles en parallélogramme. Votre œuvre aura déjà belle allure, mais il ne faudra pas vous reposer sur vos lauriers, car le plus difficile reste à faire : le branchement électrique. Il faut connecter les quatre moteurs, leurs lampes témoin, les contacteurs de butée qui permettent à l'ordinateur de savoir quand le robot est en position repliée et surtout les capteurs optiques qui contrôlent la rotation des moteurs. Les branchements sont effectués à l'aide de petites fiches vissées à l'extrémité des fils. Ceux-ci proviennent d'une nappe qui se divise successivement pour alimenter tous les éléments du bras, jusqu'à la pince. A l'autre extrémité, la nappe se termine par une prise qui se branche sur l'interface. Ce montage électrique, sans être véritablement complexe, nécessite beaucoup de soins pour que le bras fonctionne de manière satisfaisante. Les fils doivent être coupés à la bonne longueur et disposés de manière à ne pas entraver les mouvements du robot, surtout sa rotation. Cela n'est pas toujours simple car il faut glisser les fils dans des endroits difficilement accessibles. Il est primordial de respecter le plan de câblage fourni. Cette partie du montage nécessite le contrôle d'un adulte. Une fois le robot terminé, il vous reste à le brancher sur l'interface et à raccorder celle-ci à votre ordinateur. Signalons qu'une alimentation externe est nécessaire pour fournir la puissance nécessaire aux moteurs. A ce jour, Fischer Technik propose des interfaces pour les micro-ordinateurs suivants : Amstrad CPC, Apple II (sauf IIe), Acom, Commodore (C 64, SX 64 et Vic 20), Thomson (gamme TO 7 et TO 9). Une version IBM PC et compatibles est annoncée pour novembre. A l'exception de la version Thomson, toutes ces interfaces permettent de piloter le robot à l'aide de programmes Basic dont des exemples sont donnés sur la disquette de démonstration. Ces programmes permettent de tester les divers branchements et capteurs, de manœuvrer le robot avec le clavier ou la manette de jeu et éventuellement d'enregistrer une manipulation complexe pour la reproduire automatiquement par la suite. La documentation de l'interface Commodore que nous avons eue en main était malheureusement en allemand, ce qui est très gênant si vous n'êtes pas germanophone ou suffisamment doué en informatique pour comprendre comment fonctionnent les programmes en décryptant leur listage. L'interface Thomson se distingue des autres par plusieurs aspects et tout d'abord par son prix : 1980 F TTC au lieu de 1 220 F TTC pour toutes les autres. C'est un produit conçu en France pour Fischer et sa documentation est en français. Il s'emploie avec le langage Logo et nécessite donc que vous possédiez ce langage pour Thomson.
Les tours de Hanoï Ce choix du Logo peut sembler curieux au premier abord, mais se révèle particulièrement intéressant pour rendre la manipulation du robot simple et accessible aux plus jeunes. De nouvelles procédures Logo comme OUVREPINCE ou FERMEPINCE permettent de commander les mouvements du robot comme ceux de la tortue (procédures POSE-PLUME, AVANCE...). La seule différence est que les mouvements effectués par le robot sont réels et non plus simplement matérialisés par des points lumineux sur un écran. Pour une utilisation avancée, le langage Logo apparaît plus souple que le Basic : il permet de définir des procédures correspondant à des groupes de manœuvres pour les inclure ensuite dans des programmes plus complexes. Il existe un mode apprentissage qui fabrique des procédures Logo correspondant à des déplacements complexes du robot sans qu'il soit nécessaire de les programmer Bio Métal de Toki : bras manipulateur pour tout ordinateur muni d'une sortie parallèle pour imprimante ou d'un écran vidéo. 6 000 F TTC. Distribué par Mensana. Robot d'entraînement de Fischer Technik : 1 970 F TTC. Interface + logiciel pour Commodore (C64, SX64 et Vie 20), Apple 11 ( sauf lie), Amstrad CPC et Acom : 1 220 F TTC ; pour Thomson : 1 980 F TTC. Distribué par SP1 Kager. effectivement. Pour ce faire, vous annoncez au robot que vous souhaitez lui apprendre un mouvement, puis vous tapez la suite des commandes élémentaires qui définissent celui-ci. L'apprentissage terminé au moyen de la commande appropriée, le Logo vous annonce qu'il a défini une nouvelle procédure. Celle-ci peut non seulement être exécutée directement pour reproduire le mouvement à volonté, mais aussi être incluse dans d'autres programmes plus complexes. Un robot évolutif Parce qu'il est construit à partir d'éléments du jeu de construction Fischer Technik, ce robot a une structure évolutive, moyennant l'achat de boîtes supplémentaires. Dans le manuel de construction, plusieurs exemples montrent comment on peut modifier la forme ou l'angle de la pince. Il est également possible d'adjoindre des cellules photo-électriques pour détecter la présence d'un objet à portée de la pince. Si vous êtes plus ambitieux, rien ne vous empêche de revoir complètement le schéma de construction du robot. Les seules limites sont imposées par le nombre d'entrées/sorties de l'interface. Celui-ci est limité à la commande de quatre moteurs bi-direc-tionnels en sortie et à huit capteurs en entrée. Ces derniers peuvent être du type interrupteur pour les butées, ou optique comme les cellules photo-électriques qui repèrent la position des moteurs en comptant les secteurs alternativement rouges et noirs des disques de contrôle placés sur leurs axes. Cette limitation à quatre moteurs interdit en particulier de rajouter une articulation du poignet à ce bras. Impossible par exemple de lui faire verser quelque chose. Il est un peu dommage que manque ce cinquième degré de liberté, car cela ferme un certain nombre d'applications au robot Fischer Technik par ailleurs très réussi. MATÉRIEL TESTÉ: Appareils du commerce. Bio Métal : testé sur Thomson TO 9. Robot Fischer Technik : testé avec les interfaces Thomson TO 9 et Commodore. Documentation : en français, pour Bio Métal; trilingue, pour Fischer Technik (montage : en français, allemand, anglais ; logiciel : en allemand et anglais ; interface Thomson : en français; autres interfaces : en allemand). Frédéric NEUVILLE , SCIENCE & VIE MICRO N° 33 - NOVEMBRE 1986 & https://cpcrulez.fr
|
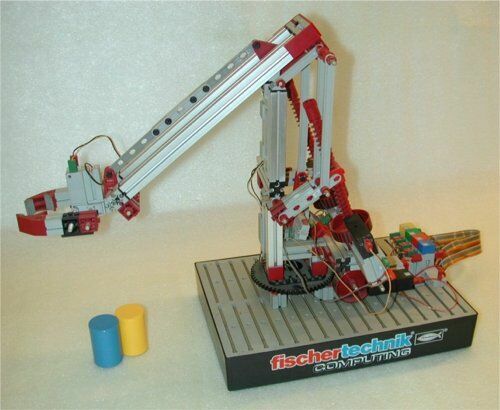
 Le micro-ordinateur est un outil idéal pour se livrer à toutes sortes de simulations. Mais la plupart du temps, tout se passe sur l'écran ou sur l'imprimante. Comment faire agir votre machine sur le monde réel ? En la reliant à un bras robot, capable de déplacer des objets, de réagir aux impulsions extérieures... sinon de faire le café ou la lessive. Nous avons essayé deux robots originaux, le Bio Métal de Toki et le robot d'entraînement de Fischer Technik ; ils peuvent être connectés à la plupart des petits micro-ordinateurs, dont les Amstrad CPC, les Apple de la série II, le Commodore 64 et les Thomson.
Le micro-ordinateur est un outil idéal pour se livrer à toutes sortes de simulations. Mais la plupart du temps, tout se passe sur l'écran ou sur l'imprimante. Comment faire agir votre machine sur le monde réel ? En la reliant à un bras robot, capable de déplacer des objets, de réagir aux impulsions extérieures... sinon de faire le café ou la lessive. Nous avons essayé deux robots originaux, le Bio Métal de Toki et le robot d'entraînement de Fischer Technik ; ils peuvent être connectés à la plupart des petits micro-ordinateurs, dont les Amstrad CPC, les Apple de la série II, le Commodore 64 et les Thomson.

 Dans la position de départ, tous les disques sont empilés sur la même tige, par ordre de taille décroissante. Le problème consiste à reconstituer la pile de disques sur l'une des deux autres tiges, en ne déplaçant qu'un seul disque à la fois d'une tige vers une autre et sans jamais poser un disque sur un autre de diamètre inférieur. Il existe une méthode classique pour résoudre ce problème de façon théorique et le robot Fischer Technik offre la possibilité supplémentaire d'exécuter effectivement la manipulation des disques. Il suffit, grâce au mode d'apprentissage, d'enregistrer les procédures permettant de déplacer un disque de la tige 1 à la tige 2, de la tige 2 à la tige 3... Ensuite, lorsque le programme de résolution logique du casse-tête décidera qu'il faut déplacer un disque de la tige 1 à la tige 2, il lui suffira d'appeler la procédure correspondante.
Dans la position de départ, tous les disques sont empilés sur la même tige, par ordre de taille décroissante. Le problème consiste à reconstituer la pile de disques sur l'une des deux autres tiges, en ne déplaçant qu'un seul disque à la fois d'une tige vers une autre et sans jamais poser un disque sur un autre de diamètre inférieur. Il existe une méthode classique pour résoudre ce problème de façon théorique et le robot Fischer Technik offre la possibilité supplémentaire d'exécuter effectivement la manipulation des disques. Il suffit, grâce au mode d'apprentissage, d'enregistrer les procédures permettant de déplacer un disque de la tige 1 à la tige 2, de la tige 2 à la tige 3... Ensuite, lorsque le programme de résolution logique du casse-tête décidera qu'il faut déplacer un disque de la tige 1 à la tige 2, il lui suffira d'appeler la procédure correspondante.

